Zakładka „Optymalizacja”
Pod zakładką „Optymalizacja” ukrywają się „Jokery” filtra importu 3DS. Tu można z jednej strony usunąć niewidoczne powierzchnie z obiektu 3DS, z drugiej zaś automatycznie obrócić powierzchnie nieprawidłowo zorientowane.
24.5.4.4.5.1 Usuwanie niewidocznych powierzchni
Jeśli importowany jest np. obiekt 3DS, składający się ze stożka ukrytego w drugim stożku, ten wewnętrzny stożek nie będzie widoczny, ponieważ jest on zamknięty z każdej strony. Za pomocą optymalizerów ArCon można niewidoczne krawędzie – w tym przypadku wewnętrzny stożek – całkowicie wyeliminować. Zmniejsza się dzięki temu ilość przedstawianych powierzchni i wzrasta szybkość prezentacji.
24.5.4.4.5.2 Odwracanie powierzchni
Podczas importowania plików 3DS, które zostały stworzone w innych programach niż 3D Studio czy 3D Studio MAX, może się zdarzyć, że niewidoczna jest duża część powierzchni. Powodem jest fakt, że ArCon prezentuje tylko te powierzchnie, których pion skierowany jest w kierunku obserwatora (hasło: reguła prawej dłoni). Powierzchnie o odwrotnej orientacji są widoczne tylko z tyłu i z tego względu nie widać ich z punktu obserwacji.
Możliwością obejścia tego problemu jest użycie materiałów dwustronnych w 3D Studio. Ma to jednak tę zasadę, że wszystkie powierzchnie są widoczne zawsze z obu stron.
Innym sposobem jest użycie optymalizera: może on automatycznie określić, czy dana powierzchnia zorientowana jest prawidłowo czy też nie i czy należy ją ewentualnie odwrócić. Powierzchnie, widoczne z obu stron (kartka papieru wymodelowana z czworokąta) są automatycznie zaznaczane jako dwustronne.
Jeśli używany jest optymalizer filtra importu 3DS, wychodzi on z założenia na początku optymalizacji, że żaden materiał nie jest dwustronny (a więc także i ten, który był zaznaczony jako dwustronny w 3D Studio). Przestawia on potem dokładnie powierzchnie (nie materiały) na dwustronne, dla których jest to rzeczywiście konieczne.
24.5.4.4.5.3 Podstawowe zasady Optymalizera
Podstawa działania optymalizera jest bardzo prosta i można ją nawet zaobserwować. Działa on dokładnie tak, jak człowiek, który ogląda obiekt z wszystkich stron aby zdecydować, która powierzchnia jest nieprawidłowo zorientowana. Rysuje on obiekt x razy, zmieniając każdorazowo pozycję obserwatora, i decyduje dla każdego obrazu, która powierzchnia widziana jest jako przednia a która jako tylna.
Na końcu optymalizacji na podstawie udziału powierzchni decydowane jest, czy powierzchnia jest powierzchnią z tyłu lub z przodu czy też jest widoczna z obu stron. Powierzchnie, które nie są w ogóle widoczne podczas tej analizy stają się niewidoczne i są odpowiednio całkowicie usuwane bądź opcjonalnie zaznaczane jako dwustronne.
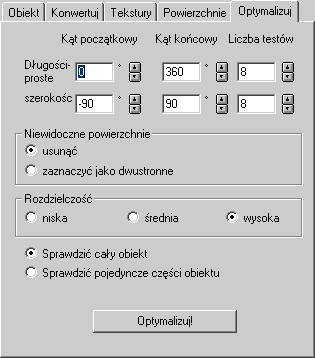
Poprzez ustawienia w zakładce „Optymalizacja” określane jest zachowanie podczas wirtualnego obchodu. Trzy pola Kąt początkowy, Kąt końcowy i Liczba testów dla Stopnia szerokości i Stopnia długości określają zasadniczo, skąd obiekt ma być oglądany. Wybór dla Stopnia długości kąta 0° jako kąta startowego i 360° jako kąta końcowego i podanie liczby 8 dla liczby testów spowoduje, że „wirtualny obserwator” jeden raz obróci się wokół obiektu i obejrzy go w tym czasie z ośmiu pozycji. 0° odpowiada przy tym osi x, 90° osi y itd.
Dla Stopnia szerokości obowiązuje w zasadzie to samo; jedynie rozumiane jest tu działanie nie dla horyzontalnej pozycji obserwatora, ale dla wertykalnej. Kąt początkowy -90° odpowiada startowi na biegunie południowym, Kąt końcowy 90° odpowiada końcowi na biegunie północnym. Liczba testów podaje, ile ma zostać zrobionych kroków. Podanie dla stopnia szerokości i długości liczby ośmiu testów spowoduje, że obiekt będzie oglądany z 8 x 8 = 64 różnych pozycji.
Może się zdarzyć, że z powodu wzajemnego zakrywania się obiektów kąt kroków jest zbyt mały i nie widać w efekcie kilku powierzchni, ponieważ część obiektu nie została dostrzeżona z odpowiedniego kierunku. W tym przypadku należy zwiększyć liczbę testów.
Dzięki temu, że dla Kąta startowego i końcowego stopnia szerokości i długości można ustawiać wartości osobno, mogą powstawać różne interesujące warianty optymalizacji. Jeśli np. wiedzą Państwo, że obiekt nigdy nie jest oglądany od dołu (np. waza podłogowa) można dla Kąta startowego w Stopniu szerokości wybrać wartość 0. Obserwator nie patrzyłby na wazę nigdy od dołu i na odpowiednie powierzchnie spodu wazy. Zostałyby one „zoptymalizowane”. To samo obowiązuje zresztą dla tylnych elementów szaf itp. Tu muszą Państwo sami zdecydować, co jest ważniejsze: możliwie schematyczne przestawienie obiektu i szybki rendering czy możliwie pełna prezentacja przy odpowiednio zredukowanej szybkości prezentacji.
24.5.4.4.5.4 Obszar „Niewidoczne powierzchnie”
W obszarze „niewidoczne powierzchnie” podawane jest, co ma stać się z powierzchniami, które nie są widoczne podczas optymalizacji. Mogą Państwo wybrać, czy mają one zostać całkowicie usunięte, czy też zaznaczone jako dwustronne. Ponieważ powierzchnie te nie są widoczne nie można też zdecydować, czy prawidłowa jest ich orientacja. Z tego powodu istnieją dwa warianty.
Powodem nie usuwania niewidocznych powierzchni może być fakt, że w obiektach o skrajnie wysokim współczynniku face’owania nie wystarcza rozwiązanie oglądania, aby w ogóle zobaczyć powierzchnię. Powierzchnie te są wtedy „niby” niewidoczne, ponieważ są zbyt małe. Duże zbliżenie w ArCon na taki obiekt pozwala to bardzo dobrze zauważyć. Teraz mają Państwo trzy możliwości, by uniknąć tego efektu:
Wariant 1:
Podczas modelowania używane są duże powierzchnie, co ogólnie jest najlepszym rozwiązaniem, ponieważ wzrasta wyraźnie wydajność i nie ma zauważalnych różnic w prezentacji.
Wariant 2:
W obszarze „niewidoczne powierzchnie” zaznaczona jest opcja „zaznacz jako niewidoczne”. Z punktu widzenia wydajności jest to najgorsze rozwiązanie, oferuje jednak gwarantowany dokładny efekt, ponieważ w przypadku wątpliwych powierzchni lepsza jest jedna powierzchnia za dużo niż za mało.
Wariant 3:
Należy podwyższyć rozdzielczość podczas badania powierzchni (patrz następny rozdział).
24.5.4.4.5.5 Obszar „Rozdzielczość”

Podawana jest tu rozdzielczość analizowania obiektu. Jak wspomniano wyżej obiekty oglądane są ze wszystkich stron i renderowane w tzw. buforze. Rozdzielczość tego bufora jest zależny od szczegółowości detali, które mają jeszcze być pokazane.
W obszarze „Rozdzielczość” można wybrać między „niska”, „średnia” i „wysoka”. Dla prostych obiektów wystarczy z reguły niska rozdzielczość; dla średnio rozbudowanych wystarczy rozdzielczość średnia. Jedynie dla obiektów o bardzo małych powierzchniach należy wybrać „wysoka”.
Wskazówka: Omawiany bufor można zaobserwować podczas Optymalizacji.
24.5.4.4.5.6 Co jest optymalizowane i w jaki sposób
Jak powiedziano na początku rozdziału o optymalizacji, podczas optymalizacji obiekty są oglądane z wszystkich stron. Można tylko zdecydować, czy zaznaczone obiekty mają być badane i optymalizowane czy też optymalizowane jako całość.
Podawaliśmy już przykład stożka. Jeśli oba stożki byłyby badane osobno, zewnętrzny stożek nie zakrywałby wewnętrznego i powierzchnie nie zostałyby usunięte, co w tym przypadku było pożądane. Orientacja będzie jednak dopasowana prawidłowo dla obu stożków. Jeśli oba stożki są badane równocześnie, wewnętrzny stożek zniknie – będzie „zoptymalizowany”.
Poprzez pole wyboru „badanie całego obiektu” wybierana jest druga alternatywa. Poprzez pole „badanie pojedynczych części obiektu” – pierwsza.
Ostatecznie wszystkie ustawienia wywołują konkretny efekt po potwierdzeniu ich klawiszem Optymalizuj teraz!.
24.5.4.4.5.7 Przebieg optymalizacji
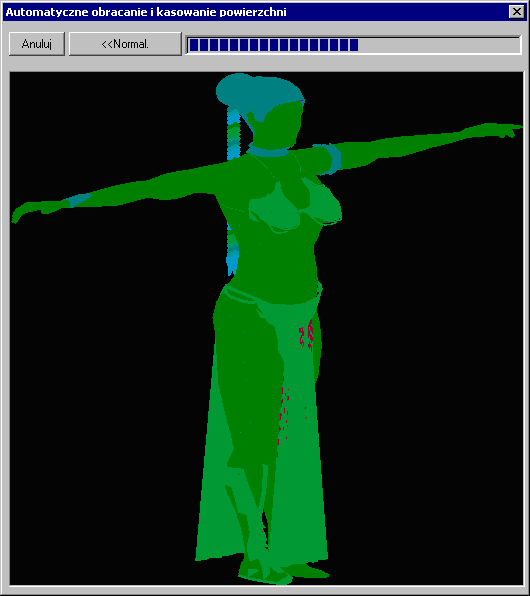
Po kliknięciu Optymalizuj teraz! Ukazuje się okno, składające się z dwu ikon Przerwij i Rozszerzone >> wzgl. << Normalne i z belki postępu. Jeśli na drugim klawiszu jest opis Rozszerzone >>, poprzez kliknięcie na nim uzyskać można przedstawienie opisywanego wcześniej bufora. Można obserwować w ten sposób proces badania obiektu z wszystkich stron. Ponowne kliknięcie pozwala ukryć wyświetlanie bufora. Optymalizacja przy ukrytym buforze jest nieco szybsza niż przy widocznym.
Wskazówka: Prezentowane podczas optymalizacji kolory nie mają nic wspólnego z cechami materiałów. Zielone powierzchnie oznaczają powierzchnie widziane z przodu, czerwone – widziane z tyłu i będące kandydatkami do przeorientowania.
Kliknięcie podczas optymalizacji na Przerwij, powoduje przerwanie procesu optymalizacji i odrzucenie ewentualnego wyniku.
Liczba odrzuconych powierzchni podczas optymalizacji może być w pewnych warunkach bardzo duża; szczególnie wtedy, gdy badany jest cały obiekt, ponieważ w tym przypadku pojedyncze części obiektu są częściowo wzajemnie przez siebie pozakrywane i mogłyby zostać usunięte częściowo. Efekt ten można zaobserwować, kiedy obiekt jest najpierw optymalizowany a potem obiekt jest zaznaczony w drzewie hierarchii.
Jeśli np. dla przedstawionej na rysunkach kobiety wyłączone zostaną włosy po optymalizacji, można będzie stwierdzić, że większość powierzchni głowy już nie istnieje. Jeśli włosy zostaną odznaczone przed optymalizacją, głowa będzie całkowicie zamknięta.