W programie R3D3-Rama 3D od wersji 15 umożliwiono rozpoczęcie modelowania struktury prętowej dla pustego projektu również przy wstępnie wybranym trybie „przestrzennym – między węzłami”. W tym trybie dowolnie skręcony widok przestrzenny reprezentowany przez widok skręconego globalnego układu współrzędnych w lewym dolnym rogu ekranu graficznego, po wybraniu funkcji wprowadzania pręta („sztywny-sztywny” lub „przegub-przegub”) nie ulega automatycznemu obrotowi do jednej z płaszczyzn głównych. W takim przypadku dowolne kliknięcie na płaskim ekranie monitora nie precyzuje trzech współrzędnych lokalizacji takiego kliknięcia. Aby tego uniknąć pierwsze kliknięcie w pustym projekcie powoduje automatyczne przemieszczenie punktu o współrzędnych (0,0,0) określonych w globalnym układzie współrzędnych do orientacyjnego punktu kliknięcia. W ten sposób użytkownik zawsze zaczyna w tym trybie wprowadzanie elementów modelu od punku o globalnych współrzędnych 0,0,0. Po wyznaczeniu położenia węzła początkowego pierwszego pręta pozostaje nam wyznaczenie położenia węzła końcowego pręta. Ponownie dowolne kliknięcie na płaskim ekranie monitora nie precyzuje trzech współrzędnych lokalizacji węzła końcowego pręta ale mamy tu kilka innych możliwości:
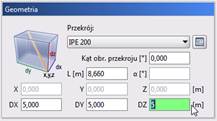
•Po pierwsze możemy przez kliknięcie prawego klawisza myszki chwilowo rozdzielić kursor graficzny i edycyjny, przejść na zakładkę Geometria i w polach edycyjnych dx, dy, dz wpisać współrzędne względne węzła końcowego pręta względem węzła początkowego. Wciśnięcie klawisza Enter akceptuje wpisane współrzędne.
Węzeł końcowy pręta lokalizowany przez współrzędne względne
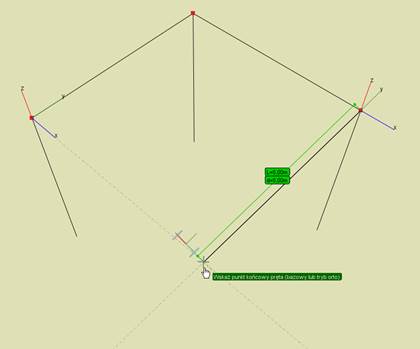
•Po drugie tak jak poprzednio określamy lokalizację przez podanie współrzędnych względnych dx, dy, dz traktując ją tym razem jako wskazanie kierunku wektora a długość pręta we wskazanym kierunku określamy przez podanie długości L w odpowiednim polu edycyjnym na zakładce Geometria. Nowe położenie końca pręta akceptujemy wciskając klawisz Enter.

Węzeł końcowy lokalizowany prze podanie długości pręta we wskazanym kierunku
•Po trzecie w przypadku wprowadzania bardzo częstych konstrukcji ortogonalnych posługujemy się jedną z sześciu półosi zawsze równoległych do jednej z osi układu globalnego, wystawianych automatycznie z węzła początkowego do których program realizuje przyciąganie. Po określeniu w ten sposób kierunku wprowadzania pręta, puszczamy myszkę i z klawiatury wpisujemy odpowiednią jego długość w danym kierunku. Po zdefiniowaniu węzła końcowego pręta funkcja wprowadzania prętów jest kontynuowana a węzeł ten staje się węzłem początkowym kolejnego pręta z którego ponownie wystawiane jest sześć półosi do których program realizuje przyciąganie.
•


Węzeł końcowy lokalizowany na jednej z półosi wyprowadzonych z węzła poczatkowego
Korzystając z trzeciej z opisanych możliwości w bardzo łatwy i szybki sposób można w trybie przestrzennym wprowadzić dowolną konstrukcję ortogonalną.
Dalsze możliwości przy wprowadzaniu elementów w trybie przestrzennym dotyczą wykorzystania śledzenia (przy włączonym trybie śledzenia). Śledzenie w tym trybie polega na wystawieniu z węzła na który naprowadzono kursor myszką (bez klikania na węzeł) linii pomocniczej w postaci jednej z sześciu półosi (zawsze najbliższej kursora myszki), równoległej do osi globalnego układu współrzędnych oraz wyprowadzeniu linii pomocniczej w postaci przedłużenia pręta przy najechaniu kursorem myszki na jeden z jego końców (bez klikania). Aby zachować maksymalną czytelność przy wprowadzaniu prętów, zawsze jednocześnie może być rysowane w trybie śledzenia maksymalnie 4 linie pomocnicze (2 półosie z węzłów i 2 przedłużenia prętów).
Lokalizowanie punktu przecięcia za pomocą śledzenia
Do tak wystawionych linii pomocniczych realizowane jest przyciąganie w postaci punktów charakterystycznych: bliski z domiarem (ustawianym precyzyjnie za pomocą odpowiednich kursorów-strzałek klawiatury), prostopadły oraz rzeczywisty punkt przecięcia linii pomocniczych lub linii pomocniczych i prętów. Wszystkie te punkty charakterystyczne na liniach pomocniczych oraz te i pozostałe punkty przyciągania na istniejących prętach pozwalają precyzyjnie lokalizować w trybie przestrzennym wprowadzane węzły początkowe i końcowe nowych prętów. Po wprowadzeniu fragmentu konstrukcji, będąc w trybie przestrzennym, po wywołaniu funkcji wprowadzania pręta jako węzeł początkowy możemy wskazać punkt charakterystyczny na linii pomocniczej lub na istniejącym pręcie. W tym drugim przypadku po wskazaniu węzła początkowego (jak również węzła końcowego) na długości istniejącego pręta, wyświetlone zostanie zapytanie czy istniejący pręt ma zostać podzielony węzłem. Jeśli chcemy by oba elementy były w tym węźle w jakikolwiek sposób fizycznie połączone, należy zawsze potwierdzić podzielenie pręta węzłem.
W przypadku gdy przy wykorzystaniu wyżej opisanych możliwości jako potencjalny punk końcowy pręta wskażemy dowolny punkt charakterystyczny układu i zamiast zatwierdzić jego lokalizację klawiszem Enter naciśniemy klawisz Spacji, wówczas nie zostanie do układu wprowadzony pręt o takiej lokalizacji zakończenia a zamiast tego węzeł początkowy wprowadzanego pręta zostanie przeniesione w nową wskazaną ostatnio lokalizację.